We went through 3 iterations, 2 in FoamCore and 1 in MDF/Acrylic.
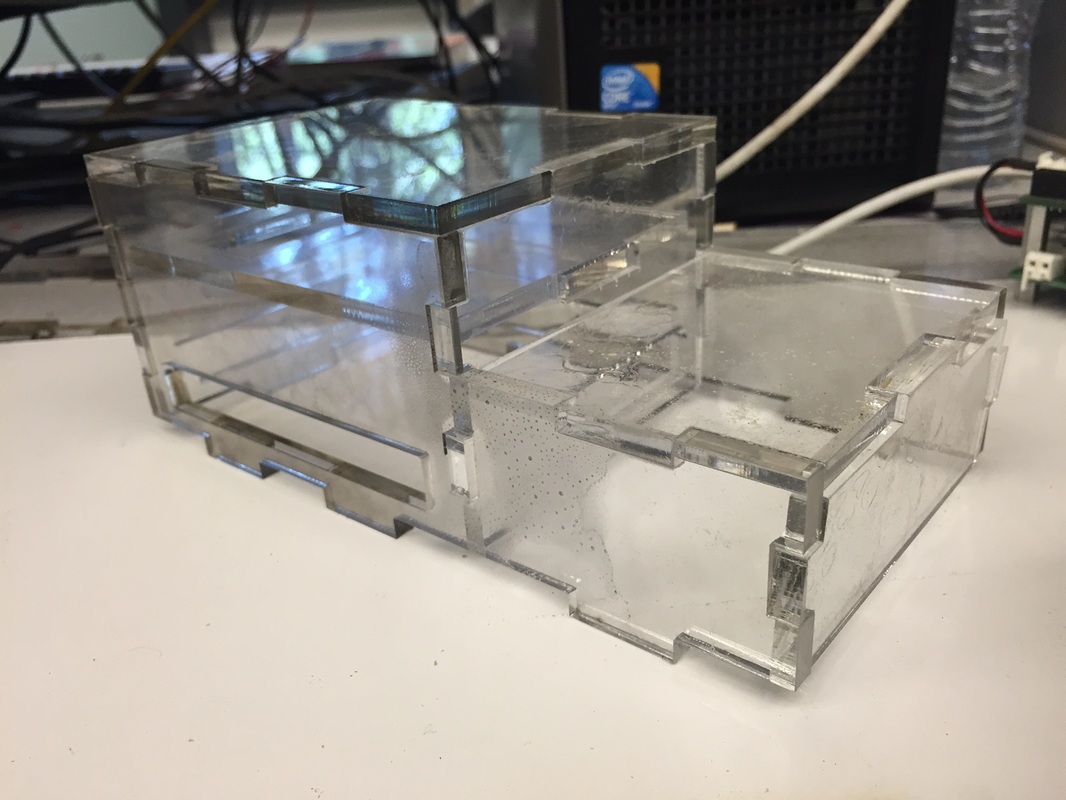
The MDF will most likely be our final iteration, however the acrylic enclosure for the PIC32, UNO32, magnetometer, and additional H-bridge, will have to be modified to make more room for pins and wires.
Major changes between iterations:
2nd Iteration (FoamCore):
Note also the smaller base (1/2 size) which was printed accidentally due to incorrect scaling.
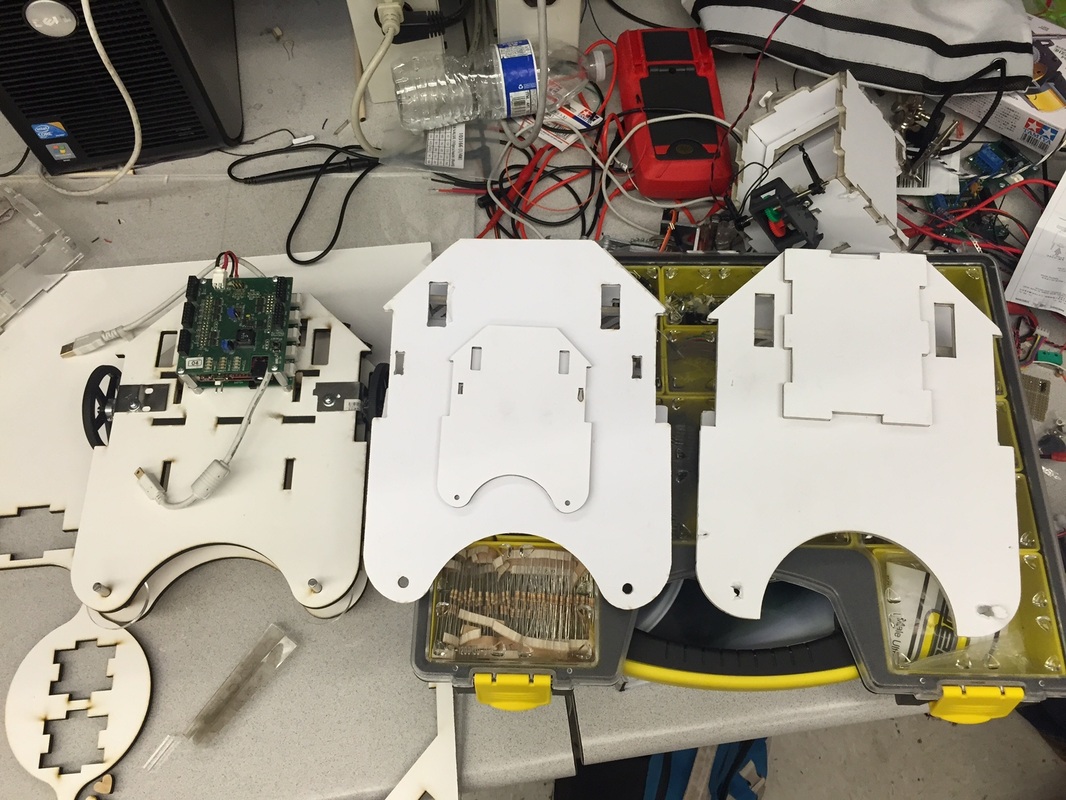
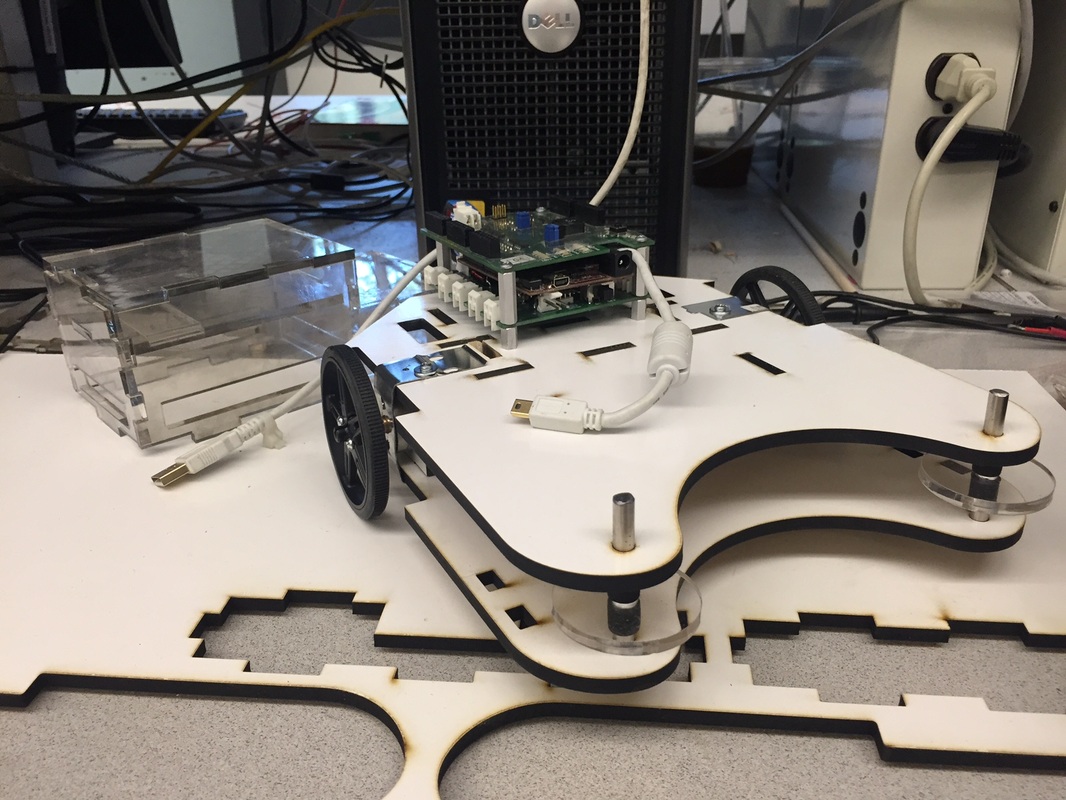
3rd Iteration (MDF/Acrylic):
The MDF will most likely be our final iteration, however the acrylic enclosure for the PIC32, UNO32, magnetometer, and additional H-bridge, will have to be modified to make more room for pins and wires.
Major changes between iterations:
2nd Iteration (FoamCore):
- reduce circular inset for throne due to incorrect reach of claw with the deeper inset (i.e. the claw overshot when trying to grab the crown, because the base wrapped around 1/2 of the throne)
- rounded all edges of base for better maneuverability when turning against walls
- remove additional base of the enclosure (it had no purpose other than to attach to the robot base, but now the enclosure tabs directly into the robot base)
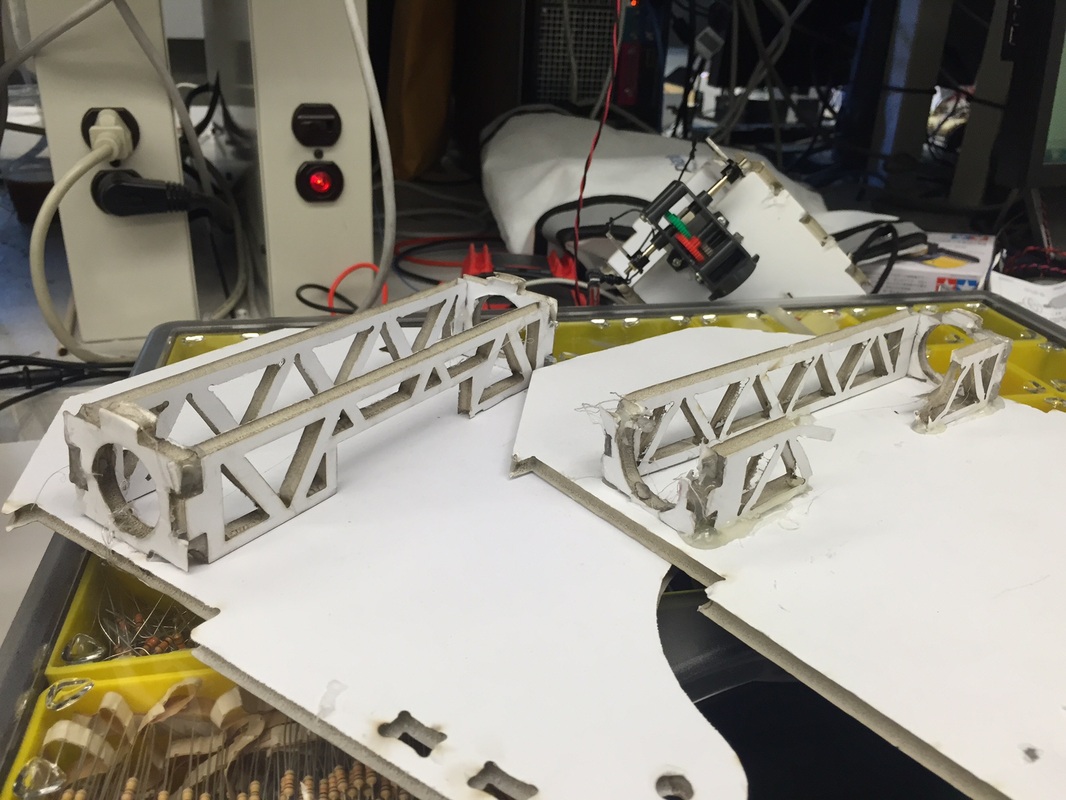
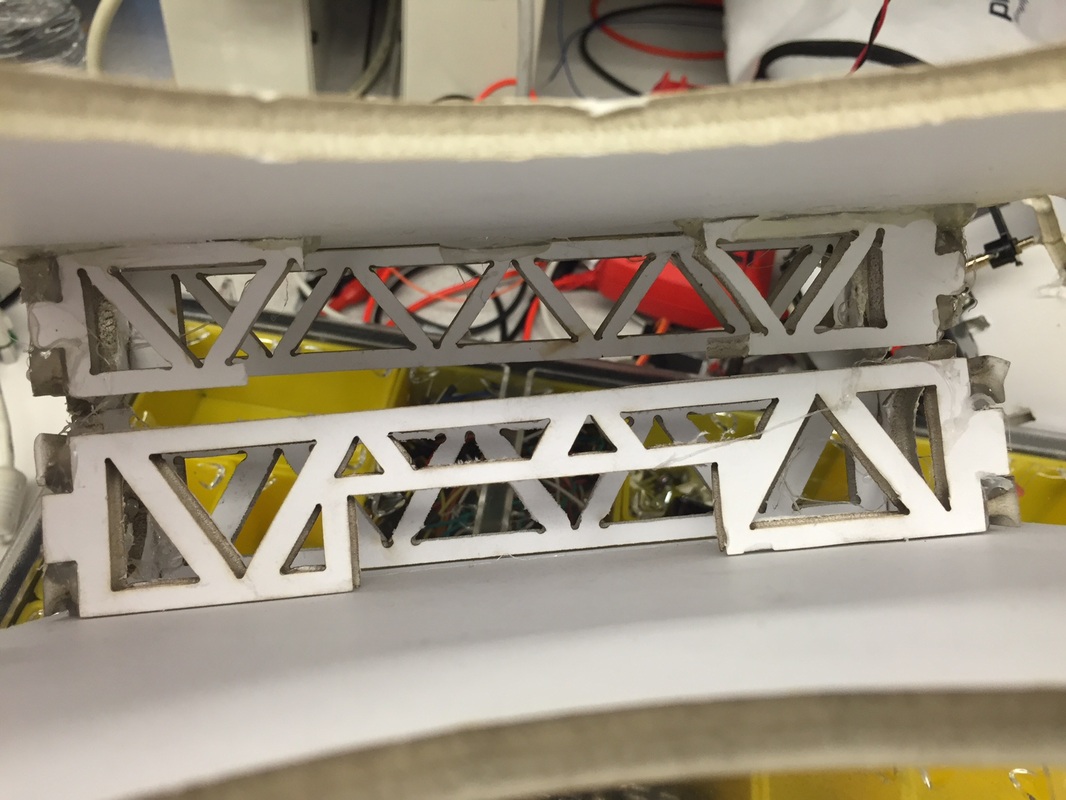
- strengthened truss by reducing the number of triangles and therefore increasing the thickness between each cutout; also added a slot for the beacon detector
Note also the smaller base (1/2 size) which was printed accidentally due to incorrect scaling.
3rd Iteration (MDF/Acrylic):
- added additional slots for wires (e.g. for tape sensor, acrylic enclosure, power, etc)
- extended enclosure to fit UNO32 and magnetometer, in addition to the PIC32 and 2nd H-bridge
- shortened the height of enclosure so that the claw is at the proper height for grabbing the crown
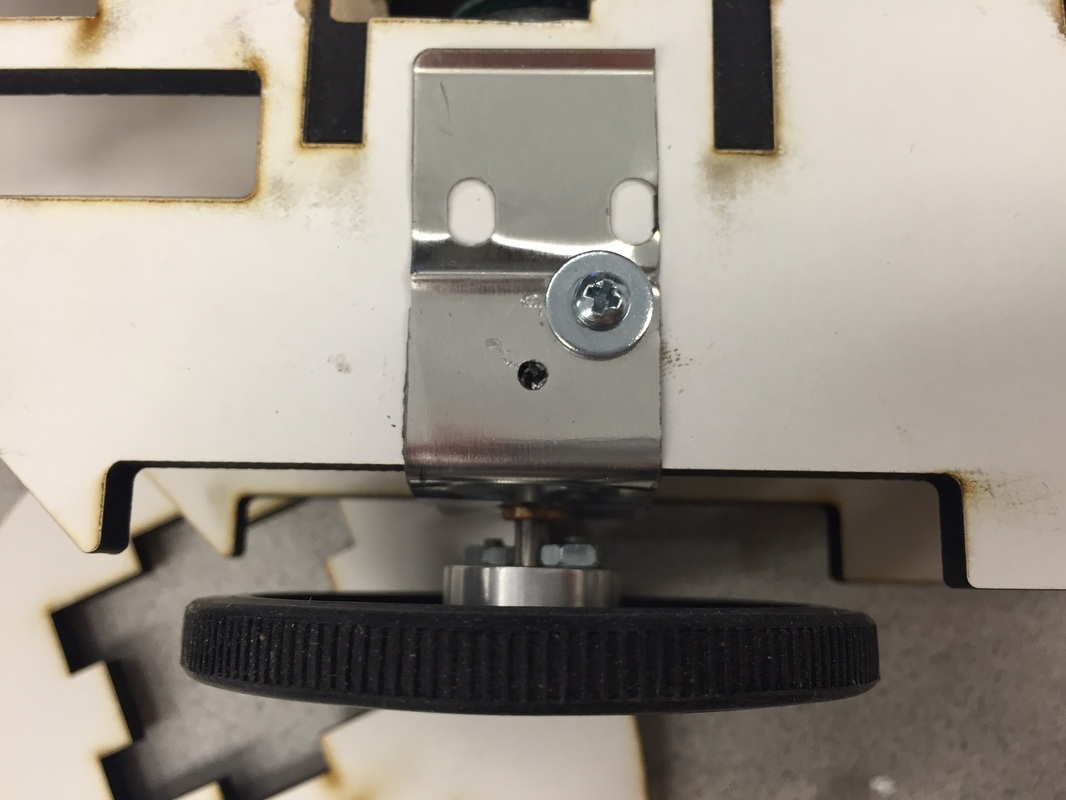
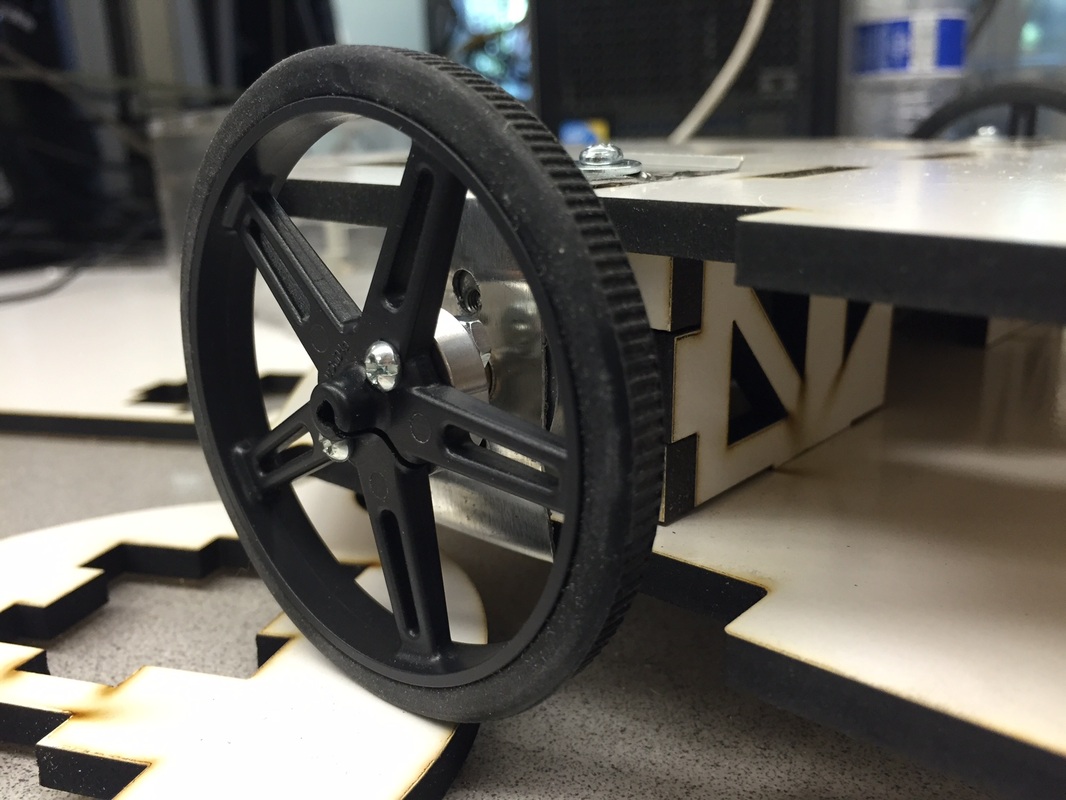
- added metal motor mounts to hold driving motors in place
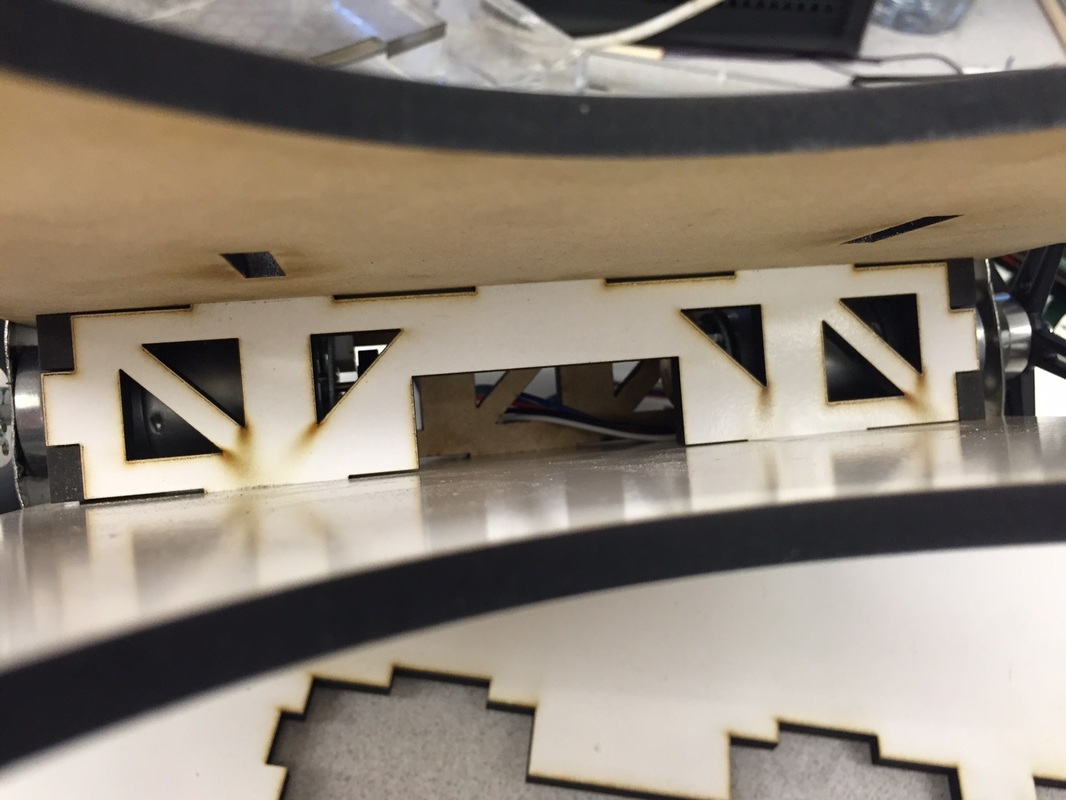
- strengthened truss by changing the arrangement of the triangle cutouts and thereby increasing the thickness between them even more; added more tabs to the truss to slot into upper and lower base more securely (the trusses were previously slotted only into the motor mounts, not the robot bases)
